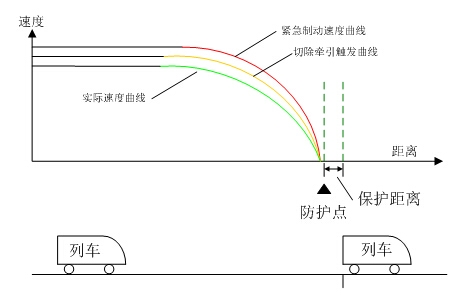
FZL300型CBTC系統(tǒng)采用移動(dòng)閉塞控制方式�,基于連續(xù)的�����、高速的車地雙向通信,不斷地將列車的移動(dòng)信息發(fā)給地面區(qū)域控制中心���,區(qū)域控制中心根據(jù)得到每一列車連續(xù)的位置信息和列車其它運(yùn)行信息�,并據(jù)此計(jì)算出每一列車的移動(dòng)授權(quán)�,并不斷動(dòng)態(tài)更新,發(fā)送給列車�。列車根據(jù)接收到的移動(dòng)授權(quán)和自身的運(yùn)行狀態(tài)計(jì)算出列車運(yùn)行的速度曲線,車載ATP保證列車在該速度曲線下運(yùn)行���,當(dāng)列車的速度超過(guò)允許速度控制曲線時(shí)�����,對(duì)列車實(shí)施安全制動(dòng)控制����。ATO子系統(tǒng)在ATP子系統(tǒng)保護(hù)下�����,控制列車的牽引�����、巡航�、惰行及制動(dòng)。FZL300型CBTC系統(tǒng)結(jié)構(gòu)圖如下:
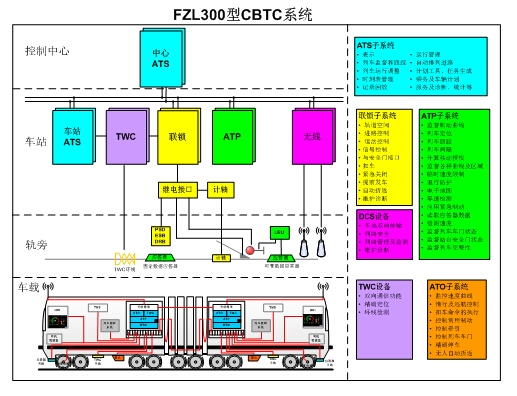
FZL300型CBTC系統(tǒng)結(jié)構(gòu)框圖
移動(dòng)閉塞的列車安全間隔是按后行列車在當(dāng)前速度下所需要的制動(dòng)距離�,加上制動(dòng)延遲距離和列車保護(hù)距離來(lái)計(jì)算的。列車保護(hù)距離是后行列車的目標(biāo)點(diǎn)和危險(xiǎn)點(diǎn)之間的一個(gè)固定距離����,該距離是在考慮了一系列最不利條件下仍能保證列車安全間隔的基礎(chǔ)上確定的。為此�����,引入了相對(duì)模式的概念����,即不考慮先行列車的速度��,而主要考慮其列車位置的處理方式��。移動(dòng)閉塞原理如下圖所示����。
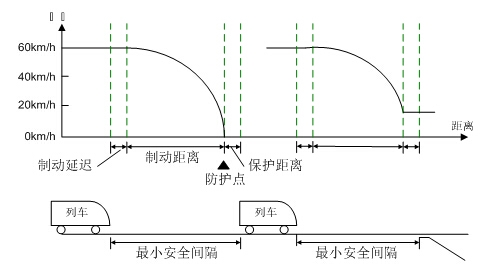
當(dāng)然��,基于通信的列車自動(dòng)控制系統(tǒng)CBTC既可以實(shí)現(xiàn)固定閉塞�����、準(zhǔn)移動(dòng)閉塞���,也可以實(shí)現(xiàn)移動(dòng)閉塞�。中國(guó)通號(hào)集團(tuán)的FZL300型CBTC系統(tǒng)采用移動(dòng)閉塞方式���,目標(biāo)距離-速度控制方式��,采用相對(duì)位置模式���,后續(xù)列車以前行列車占用的最小安全后端作為追蹤目標(biāo)點(diǎn)��。
車載ATP子系統(tǒng)的測(cè)速測(cè)距功能通過(guò)測(cè)速設(shè)備實(shí)現(xiàn)���。車載ATP考慮采用測(cè)速傳感器結(jié)合雷達(dá)的方式進(jìn)行測(cè)速測(cè)距���。其中���,通過(guò)測(cè)速傳感器獲得的脈沖信息,車載ATP計(jì)算走行距離及車輛速度�����,進(jìn)而實(shí)現(xiàn)列車定位和速度監(jiān)控��。雷達(dá)測(cè)速作為輔助方式����。車載ATP定位功能的任務(wù)是檢測(cè)并維護(hù)列車在線路上的位置。對(duì)于定位的描述方法為:車輛位于某段軌道區(qū)段的某偏移量處��。同時(shí)���,車載定位功能需要確定列車在極端情況下的位置��,包括測(cè)量不確定性����。車載定位基于連續(xù)速度測(cè)量、應(yīng)答器檢測(cè)和電子地圖信息�����。
車載定位功能確定列車前端和后端的安全相關(guān)和非安全相關(guān)位置�����。列車?yán)脜^(qū)段定位其在電子地圖中的位置��,絕對(duì)位置在(區(qū)段號(hào)����,偏移量)坐標(biāo)系統(tǒng)中規(guī)定。

列車的安全和非安全位置
列車的非安全相關(guān)位置(預(yù)計(jì)的后/前端)定義為最有可能的位置�����,僅使用在車載子系統(tǒng)中�。該位置的計(jì)算基于對(duì)不確定性的“最佳情況”估計(jì)。
在車載子系統(tǒng)(重新)啟動(dòng)后,列車位置是未知的�����,定位狀態(tài)為“失去定位”���。在檢測(cè)到兩個(gè)連續(xù)應(yīng)答器�����,同時(shí)所測(cè)量的兩個(gè)應(yīng)答器之間的距離與電子地圖相符之后,則定位狀態(tài)將變?yōu)椤岸ㄎ弧?��。步驟如下:檢測(cè)第一個(gè)應(yīng)答器用來(lái)確定電子地圖中的應(yīng)答器位置����;第二個(gè)應(yīng)答器的檢測(cè)可以用來(lái)確定列車移動(dòng)方向和列車前行方向與區(qū)段方向的關(guān)系���。
由于連續(xù)的累加測(cè)速誤差��,位置不確定性將隨著運(yùn)行距離而增加�����。車載ATP設(shè)備需要設(shè)置最大位置不確定性����。如果超過(guò)最大誤差,列車定位狀態(tài)將變?yōu)椤笆ザㄎ弧?���。?yīng)答器用于重新調(diào)整列車位置和將安全位置不確定性設(shè)置為一個(gè)基于信標(biāo)測(cè)量誤差的絕對(duì)值。
與FZL300型點(diǎn)式ATC系統(tǒng)比較�����,F(xiàn)ZL300型CBTC系統(tǒng)中增加了FZL.W型無(wú)線通信子系統(tǒng)���。軌旁增加了WAB無(wú)線接入箱作為軌旁無(wú)線通信設(shè)備�����,車載增加了TRU作為車載無(wú)線通信設(shè)備���,WAB與TRU之間進(jìn)行連續(xù)的無(wú)線通信,實(shí)現(xiàn)軌旁信息與車載信息不間斷的交互功能��。車載TRU主要由一個(gè)3U機(jī)籠構(gòu)成����,包含:一塊電源板�、一塊監(jiān)控板���、兩塊交換機(jī)板���、兩個(gè)濾波盒、兩個(gè)AP模塊等��。軌旁WAB包含兩個(gè)軌旁AP模塊�、兩個(gè)光電轉(zhuǎn)換器、兩個(gè)射頻濾波����、4個(gè)射頻防雷����、兩個(gè)48伏電源模塊、兩個(gè)電源防雷����、兩個(gè)電源濾波模塊等。
FZL.W型無(wú)線通信子系統(tǒng)主要技術(shù)指標(biāo):
不考慮網(wǎng)絡(luò)擁塞的情況下���,車地雙方向通信的延遲要求控制在250毫秒以內(nèi)�����;
車地雙向傳輸帶寬之和不能低于1Mbps�����;
車地雙向中任意方向的丟包率應(yīng)小于1%��;
車載電臺(tái)在無(wú)線覆蓋區(qū)域內(nèi)進(jìn)行漫游切換時(shí)����,要求切換時(shí)間在100ms以內(nèi);
FZL300型CBTC系統(tǒng)主要技術(shù)指標(biāo):
| 指標(biāo) |
IEEE標(biāo)準(zhǔn)推薦取值 |
FZL300型CBTC系統(tǒng)取值 |
| 單個(gè)軌旁ZC處理的最大列車數(shù)量 |
10-40列車 |
30列車 |
| 列車定位分辨率 |
±0.25m-±6.25m |
±0.02m |
| 非降級(jí)模式下����,列車測(cè)距最大允許誤差 |
±5m-±10m |
±10m |
| 未裝備屏蔽門車站ATO停站定位精度 |
±0.25m |
±0.25m |
| 裝備屏蔽門車站ATO停站定位精度 |
±0.05m |
±0.05m |
| 列車移動(dòng)授權(quán)分辨率 |
±0.25m-±6.25m |
±0.02m |
| 列車ATP測(cè)速分辨率 |
±0.5km/h-±2km/h |
±0.1km/h |
| 列車ATP測(cè)速精度 |
±3km/h |
±3km/h |
| 列車速度控制命令分辨率 |
±0.5km/h-±5km/h |
±0.5km/h |
| 車到地的通信延遲 |
0.5s-2s |
0.5s |
| 地到車的通信延遲 |
0.5s-2s |
0.5s |
| 軌旁CBTC設(shè)備反應(yīng)時(shí)間 |
0.07s-1s |
0.5s |
| 車載CBTC設(shè)備反應(yīng)時(shí)間 |
0.07s-0.75s |
0.5s |
| 退行檢測(cè)標(biāo)準(zhǔn) |
0.5m-2m |
0.5m |
| 零速檢測(cè)標(biāo)準(zhǔn) |
<1km/h-<3km/h?持續(xù)2s |
<3km/h(2s) |
| 列車位置測(cè)量精度誤差 |
? |
<=±2% |
| 列車測(cè)速范圍 |
? |
0-150km/h |

車載TRU

軌旁WAB

FZL300型CBTC車載主機(jī)